1. Управление с помощью пребразователя частоты V/F
Режим управления напряжением/частотой (V/F) предполагает поддержание постоянного соотношения между напряжением (V) и частотой (F). Другими словами, амплитуда выходного напряжения будет прямо пропорциональна выходной частоте.
Буква «V» обозначает амплитуду напряжения, создаваемого преобразователем частоты, а «F» обозначает частоту выходного напряжения преобразователя частоты. Следовательно, увеличение выходной частоты приводит к соответствующему увеличению амплитуды выходного напряжения, сохраняя пропорциональную зависимость. Ключевым принципом является поддержание постоянного магнитного потока путём сохранения соотношения V/F.
Управление V/F часто используется в управлении двигателями для обеспечения постоянного потока. Этот вариант предлагает такие преимущества, как выгодная экономическая эффективность и стабильный выходной крутящий момент, подчёркивая постоянное регулирование магнитного потока. Несмотря на это, точность регулирования скорости будет менее выражена. Данный метод подходит для применений, в которых задачи по энергосбережению имеют умеренный объём, а строгие требования к точности скорости отсутствуют. Важно также отметить, что на низких скоростях это может привести к недостаточному крутящему моменту, что потребует его компенсации.
Режим управления V/F подходит для нагрузок, характеризующихся переменным и постоянным крутящим моментом, таких как вентиляторы, водяные насосы и ленточные конвейеры.
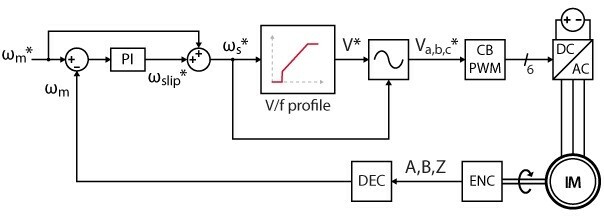
2. Управление частотой скольжения (V/F замкнутого типа)
Из-за присущих двигателям различий в скорости (∆n), соответствующих пропорциональным изменениям крутящего момента (T), регулировка выходной частоты преобразователя частоты изменяет скольжение (∆n) и, следовательно, выходной крутящий момент (T) и скорость преобразователя частоты. Данный принцип, известный как управление частотой скольжения, управляет крутящим моментом двигателя путём регулирования скольжения, эффективно контролируя его скорость.
Для достижения подобных целей управления необходима стратегия управления системой замкнутого типа, требующей наличия преобразователя частоты, оснащенного входной клеммой с обратной связью. Преобразователь частоты с управлением частотой скольжения объединяет схему сравнения и схему пропорционально-интегрально-дифференциального (ПИД) управления для обработки сигналов задания и обратной связи. Это обеспечивает точную настройку скорости управления и быстрый ответ. Существуют две методологии: одна использует датчик скорости для использования скорости двигателя в качестве обратной связи для повышения точности, а другая преобразует непрямые параметры (например, давление, расход, температуру) в сигналы обратной связи для повышения точности.
В этой системе замкнутого типа инвертор устанавливает целевое значение и сравнивает его со значением обратной связи. Если обратная связь меньше целевого значения, преобразователь частоты выдает приращение частоты, пропорционально увеличивая как скольжение (∆n), так и крутящий момент, тем самым увеличивая скорость двигателя. По аналогии, сигнал уменьшения частоты уменьшает скольжение (∆n) и, следовательно, крутящий момент, что приводит к уменьшению скорости двигателя в соответствии с заданной целью.
В отличие от управления V/F, управление частотой скольжения влечёт за собой настройку ПИД-функции внутри преобразователя частоты и требует наличия клеммы обратной связи. Внешние платы ПИД-управления необходимы для управления системами закрытого типа с использованием методов V/F (напряжение/частота).
3. Векторное управление
Векторное управление использует метод, моделирующий двигатели постоянного тока через внутреннюю электронную схему преобразователя частоты для управления двигателями переменного тока.
1. Сигнал управления разделяется на компоненты якоря, создающих поле возбуждения, что отражает методы управления двигателем постоянного тока.
2. Сигнал управления преобразуется в сигнал управления трёхфазным переменным током, адаптированный к требованиям управления трёхфазным двигателем переменного тока, подавая питание на выходную схему преобразователя частоты.
Векторное управление предлагает два подхода: бездатчиковый (с использованием внутренней обратной связи инвертора) и сенсорный (с использованием внешней обратной связи). Оба метода напрямую регулируют скорость двигателя (или крутящий момент), но не могут распространяться на управление другими переменными, такими как давление, расход или температура.
Этот метод обеспечивает точный контроль скорости и крутящего момента при одновременном управлении амплитудой и фазой тока. Кроме того, векторное управление отличается атрибутами, настраиваемыми программным обеспечением, такими как автономное сканирование параметров двигателя для включения в преобразователь частоты, индивидуальное сопряжение двигателя с преобразователем частоты и комплексное управление током.
4. Прямое управление крутящим моментом
Прямое управление крутящим моментом (DTC) является второй передовой технологией регулирования скорости переменного тока после векторного управления. Данный метод использует пространственный вектор и анализ ориентации поля статора для математического моделирования асинхронных двигателей в системе координат статора. Он рассчитывает и управляет потокосцеплением и крутящим моментом двигателя, ограничивая колебания крутящего момента в определенном диапазоне скольжения с помощью дискретного двухпозиционного регулятора. Это достигается путём сравнения определения крутящего момента с заранее заданными значениями. Скольжение регулируется посредством регулировки частоты и широтно-импульсной модуляции (ШИМ), влияя на состояния переключения преобразователя частоты и обеспечивая высокий выходной крутящий момент.
DTC также ограничен соотношением «один к одному», двигателя-преобразователя частоты, что делает его непригодным для применений в управлении технологическими процессами.
Его примечательными характеристами является возможность управления с нулевой скорости, широкий диапазон скоростей, точный контроль крутящего момента, быструю реакцию системы и точность управления на высоких скоростях.
Векторное управление хорошо подходит для задач, требующих большого крутящего момента, с постоянным выходным крутящим моментом даже при 0 Гц, таких как производство бумаги, прокат стали, станки и работа подъёмника. Между тем, контроль крутящего момента оказывается эффективным для таких применений, как производство бумаги и красильное оборудование, поддерживая постоянное натяжение во время намотки и размотки плёнки или проволоки за счёт точного контроля крутящего момента и скорости.